杭州專業(yè)大中型轉(zhuǎn)臺(tái)價(jià)格
發(fā)布時(shí)間:2022-04-12 00:34:22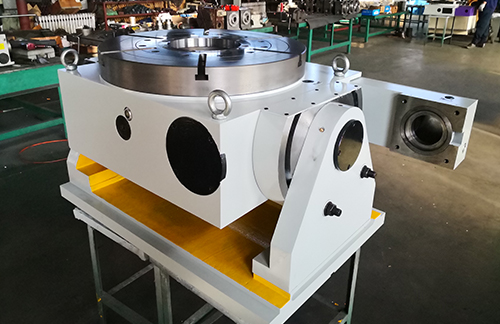
杭州專業(yè)大中型轉(zhuǎn)臺(tái)價(jià)格
在操作第四軸旋轉(zhuǎn)平臺(tái)的時(shí)候,工作之前應(yīng)仔細(xì)檢查電源以及電壓,檢查油泵的潤滑情況,檢查壓力裝置以及冷卻裝置是否運(yùn)行良好,檢查刀具以及油管是否到位,檢查夾具是否有損壞。檢查完畢之后,才能夠正常開機(jī)作業(yè)。這種檢查看似很沒有必要,其實(shí)卻十分重要。開機(jī)前各項(xiàng)檢查都做好,能有效避免貿(mào)然開機(jī)對設(shè)備造成損壞。開機(jī)前的檢查完畢后,即可開機(jī)。在機(jī)器設(shè)備啟動(dòng)之后,不要立刻進(jìn)行操作。應(yīng)該把各項(xiàng)機(jī)械做回零,然后開始試運(yùn)行,五分鐘左右再確認(rèn)一下工件、刀具以及各項(xiàng)參數(shù)是否準(zhǔn)確。若是準(zhǔn)確,則可以開始正常工作,若是不準(zhǔn)確,需要找出原因,立即修正,參數(shù)準(zhǔn)確后再開始工作。
杭州專業(yè)大中型轉(zhuǎn)臺(tái)價(jià)格
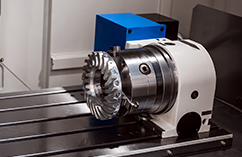
常用分度盤:是比較常用的。主軸可以在水平和垂直方向之間的任何角度傾斜。分度機(jī)構(gòu)由一個(gè)分度盤和一個(gè)蝸輪蝸桿副組成,其傳動(dòng)比為1:40。有與定位在分度盤不同相等的分割的孔多個(gè)圓。旋轉(zhuǎn)與蝸桿連接至所述定位銷插入到所選擇的定位孔,以實(shí)現(xiàn)索引手柄。當(dāng)分度板上等分的孔數(shù)不能滿足分度要求時(shí),可以通過蝸桿與主軸之間的齒輪交換來改變傳動(dòng)比,以擴(kuò)大分度范圍。在銑削機(jī)。常用分度盤的交換齒輪可以與銑床工作臺(tái)的進(jìn)給螺桿根據(jù)一個(gè)相連接,從而使工件的軸向進(jìn)料與所述旋轉(zhuǎn)運(yùn)動(dòng)相結(jié)合。Semi分度盤:結(jié)構(gòu)基本相同,普遍索引頭的,但沒有交換齒輪機(jī)構(gòu),它只能直接通過分度板索引,并且不能與銑床表被鏈接。Equal分裂指數(shù)板:一般采用具有24個(gè)狹槽或孔相等的分隔板,它可以直接實(shí)現(xiàn)2,3,4,6,8,12,和24個(gè)相等的分割,包括水平,垂直和垂直-水平式三種。垂直和水平基部具有垂直于彼此的兩個(gè)安裝表面,和主軸可以是在水平或垂直位置。
杭州專業(yè)大中型轉(zhuǎn)臺(tái)價(jià)格
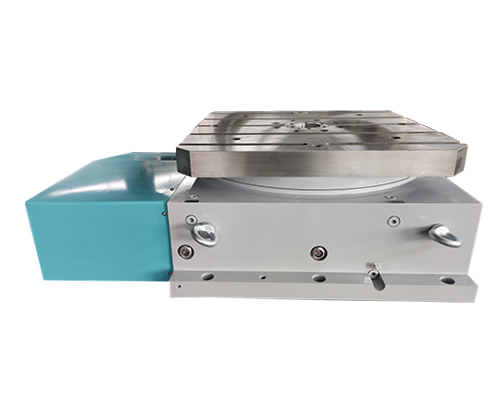
數(shù)控轉(zhuǎn)臺(tái)由伺服電機(jī)驅(qū)動(dòng),經(jīng)過齒輪減速后帶動(dòng)渦輪蝸桿副讓工作臺(tái)開始轉(zhuǎn)動(dòng)。為消除反向間隙與傳動(dòng)間隙,通過調(diào)整偏心環(huán)消除齒輪嚙合側(cè)邊縫隙。一邊的齒輪與蝸桿依靠楔形拉緊圓柱銷進(jìn)行連接,此種連接方式可以消除軸與套的配合間隙。此種蝸桿的兩邊具備不同的螺距,所以蝸桿齒厚從頭至尾都是逐漸加厚。但是因?yàn)橄嗤贿叺穆菥嗍窍嗟鹊模虼藬?shù)控轉(zhuǎn)臺(tái)依然可以保持正常嚙合。而蝸桿偏心軸套調(diào)整中心距,從而達(dá)到消除蝸桿副間隙目的。當(dāng)數(shù)控轉(zhuǎn)臺(tái)靜止時(shí),數(shù)控轉(zhuǎn)臺(tái)會(huì)處于鎖緊狀態(tài)。目前鎖緊方式有2種:鼠牙盤鎖緊,此種方式只適用于中型或小型數(shù)控轉(zhuǎn)臺(tái),鼠牙盤鎖緊方式的鎖緊力小。
杭州專業(yè)大中型轉(zhuǎn)臺(tái)價(jià)格
找圓心,對于專業(yè)人員來講,找圓心是很簡單的一件工作,因?yàn)樗麄儗?shù)控轉(zhuǎn)臺(tái)或者加工中心都已經(jīng)非常熟悉了。第四軸在機(jī)械的設(shè)施過程中具有廣泛地運(yùn)用,而在第四軸的作業(yè)過程中其時(shí)常會(huì)出現(xiàn)找不準(zhǔn)坐標(biāo)以及圓心的尷尬問題。由于工作的原因?qū)?shù)控回轉(zhuǎn)工作臺(tái)以及加工中心的事宜非常的熟悉,因此對他們來說是輕而易舉的。第四軸找圓心:在具體的操作時(shí),應(yīng)以第四軸尋找拖平機(jī)床臺(tái)。隨后尋找相對容易加工的銑工件,按照鉛塊的為例,在鉛塊中找出第四軸的一個(gè)中心圓,隨后利用中心元便可以分出中心軸。第四軸找坐標(biāo):使用傳統(tǒng)的操作方式是復(fù)雜的,由于使用工具的誤差以及作業(yè)人員的人員誤差,進(jìn)而影響第四軸的坐標(biāo)原點(diǎn)的準(zhǔn)確性不高。停止機(jī)床找正工件、相關(guān)的程序作業(yè)終止進(jìn)而不能進(jìn)行連續(xù)的工作。在生產(chǎn)效率低。而第四軸的工作臺(tái)旋轉(zhuǎn)之后的程序會(huì)自動(dòng)生成設(shè)施的坐標(biāo)系,通常在第四軸的加工工作臺(tái)進(jìn)行旋轉(zhuǎn)的時(shí)候,其運(yùn)用第四軸軸心、百分表等相關(guān)的工具。
杭州專業(yè)大中型轉(zhuǎn)臺(tái)價(jià)格
PID控制,傳統(tǒng)的PD或PID控制不僅結(jié)構(gòu)簡單,而且可靠性高。它具有穩(wěn)定性好的優(yōu)點(diǎn),但僅適用于負(fù)載低,干擾小,非線性因素小的系統(tǒng)。復(fù)合控制,復(fù)合控制可以大大提高高精度轉(zhuǎn)臺(tái)系統(tǒng)的控制精度。自適應(yīng)控制,適合物體特性或具有大范圍干擾特性和高性能要求的控制系統(tǒng)。智能控制是控制理論發(fā)展的高級階段,主要用于解決那些傳統(tǒng)的高精度轉(zhuǎn)臺(tái)控制系統(tǒng)難以解決的問題。無論使用哪種控制方法,高精度轉(zhuǎn)臺(tái)控制系統(tǒng)都要實(shí)現(xiàn)更高的性能指標(biāo)。因此,對于諸如轉(zhuǎn)盤之類的復(fù)雜控制系統(tǒng),通常將多種控制方法結(jié)合起來以彌補(bǔ)高精度轉(zhuǎn)臺(tái)單一控制方法的缺點(diǎn)。